Sangkynpi
Tài xế O-H
Xin lỗi vì bất tiện này (google nó dịch
Bánh răng
Thiết bị van bao gồm toàn bộ van điều khiển van biến áp (Valvetronic) và hệ thống điều khiển thời gian trục cam biến đổi (đôi van), cho phép lựa chọn tự do thời gian đóng của van nạp. Thời gian nâng van chỉ diễn ra ở phía cửa nhận; Kiểm soát trục cam xảy ra trên đường ống nạp và xả.
Kiểm soát tải không có bướm ga chỉ có thể thực hiện được nếu có thể kiểm soát được các biến sau:
Mô tả thành phần ngắn gọn
Các thành phần sau đây được mô tả cho các van gear:
Chỉ sử dụng trục cam nhẹ. Trục cam thải đã được trang bị với các cuộc đua vòng bi và đóng gói trong một nhà ở trục cam. Vỏ trục cam giảm bọt dầu trong quá trình vận hành.
Lượng và van xả
Thiết bị van được trang bị hệ thống kiểm soát thời gian trục cam thay đổi (VANOS đôi) cho trục nạp và trục cam. VANOS cho phép thay đổi thời gian trong việc mở van nạp và xả.
Cảm biến trục cam vào và cảm biến trục cam thải
Hai cảm biến trục cam bắt đầu giai đoạn khoảng cách của trục cam. Để kết thúc này, một bánh xe tăng (bánh xe cảm biến trục cam) được cố định vào trục cam. Cảm biến trục cam hoạt động theo hiệu ứng Hall. Nguồn cung cấp điện áp được điều khiển bởi Thiết bị Điện tử Kỹ thuật số (DME) với đầu cuối 15. Bộ cảm biến này cung cấp tín hiệu số qua đường tín hiệu đến Điện tử Điện tử số (DME).
Cảm biến trục khuỷu nạp được gắn vào vỏ đầu xi-lanh. Trong trường hợp thất bại của cảm biến trục khuỷu, Digital Engine Electronics (DME) sử dụng tín hiệu để tính tốc độ động cơ. Cảm biến trục khuỷu và cảm biến trục cam bắt đầu là cần thiết cho việc phun nhiên liệu tuần hoàn hoàn toàn (tiêm nhiên liệu diễn ra riêng cho mỗi xylanh tại điểm khởi động cụ thể).
Cảm biến trục khuỷu cho phép Bộ Công cụ Kỹ thuật Số điện tử (DME) phát hiện ra động cơ 1 xilanh có bị nén hay xả không. Ngoài ra, cảm biến này cung cấp tín hiệu phản hồi cho vị trí trục cam điều khiển điều khiển thời gian trục cam thay đổi (VANOS).
Cảm biến trục khuỷu nạp được thiết kế như là một bộ cảm biến có cảm quan hội trường quy nạp. Bánh xe cảm biến trục cam có 6 khoảng cách sườn khác nhau. Những khoảng cách cánh này được lấy bởi bộ cảm biến hiệu ứng Hall.
Điện tử Công nghệ Số (DME) sử dụng tính năng này để tính toán:
Ví dụ N55
Mục Giải trình Mục Giải trình
1 Cảm biến trục cam vào 2 Kết nối cắm ba chân
Để bắt đầu động cơ, Công cụ Điện tử Kỹ thuật số (DME) kiểm tra các điều kiện sau:
Khi điện áp được áp dụng, nó được phát hiện xem các cảm biến nằm trên răng hoặc trên một khoảng cách.
Điện tử Kỹ thuật số Động cơ (DME) đọc trong tín hiệu cảm biến và sau đó so sánh tín hiệu đó với một mẫu trong đơn vị bộ nhớ của nó. Điều này phát hiện vị trí chính xác của trục cam.
Van van solanoid của VANOS và Van xả VANOS
Hệ thống điều khiển thời gian trục cam biến cải thiện mô-men xoắn trong dải tốc độ động cơ thấp và giữa. Đồng thời, điều chỉnh thời gian hoạt động van tốt nhất cho tốc độ nhàn rỗi và công suất ra tối đa được điều chỉnh. Sự chồng chéo van lớn hơn dẫn đến lượng thấp hơn của khí còn lại ở tốc độ không tải. Việc tuần hoàn khí thải trong phạm vi tải một phần làm giảm thể tích nitrogen oxide.
Những điều sau đây cũng đạt được:
Ví dụ N55
Mục Giải trình Mục Giải trình
A Phía sau của bánh xe gia tăng B Mặt trước của bánh xe gia tăng
Ví dụ N55
Mục Giải trình Mục Giải trình
1 Van solenoid VANOS, đầu vào 2 Van solenoid VANOS, ống xả
3 Kết nối cắm hai chân 4 Kết nối cắm hai chân
Van solenoid VANOS kích hoạt bộ phận VANOS. Các vị trí yêu cầu của trục nạp và trục cam thải được tính toán từ tốc độ động cơ và tín hiệu tải (phụ thuộc vào nhiệt độ cửa hút và nhiệt độ nước làm mát). Điện tử Công nghệ Số (DME) kích hoạt các đơn vị VANOS thông qua Van solenoid VANOS.
Van đầu vào và van xả của VANOS được định vị trục trên mặt trước của đầu xi-lanh. Van solenoid VANOS (có van không van trở lại) phân phối áp suất dầu cho hai đơn vị VANOS.
Tốc độ không tải:
Ở tốc độ không tải, trục cam được điều chỉnh sao cho có sự chồng chéo nhẹ để tối ưu hóa tiêu thụ và vận hành êm ái. Sự chồng chéo van nhỏ nhất đã đạt được với sự tuyệt vời của sự lan truyền lượng khí thải lớn nhất có thể và sự lan rộng của ống xả có thể xảy ra. Van solenoid của VANOS bị mất điện ở đây. Vị trí trục cam cũng được giả định khi ngừng động cơ. Trong trạng thái này, bộ điều chỉnh trục khuỷu khóa để sau khi khởi động động cơ, có một sự điều chỉnh trục cam ổn định. Điều chỉnh trục cam ổn định này cũng đạt được khi bơm dầu chưa xây dựng được áp suất dầu đủ để điều chỉnh trục cam. Với yêu cầu điều chỉnh đầu tiên, dầu chảy trong mở khóa điều chỉnh trục cam thải.
Công suất ra:
Để đạt được mô men xoắn cao ở tốc độ động cơ thấp, van xả được mở muộn. Điều này cho phép mở rộng quá trình đốt để di chuyển piston lâu hơn. Ở tốc độ động cơ cao, van lớn hơn chồng lên nhau (van xả mở và van xả mở muộn) đạt được công suất đầu ra chiều cao.
Để đạt được mô men cao, phải đạt được hiệu suất cao. Tùy thuộc vào chân không ống nạp (áp suất nạp) và áp suất xả của ống xả, van nạp hoặc xả phải hoặc mở hoặc đóng sớm hay muộn hơn. Một động cơ với VANOS nằm trong một phạm vi rộng tốc độ động cơ với phí xi lanh tối ưu hóa. Một động cơ với VANOS đòi hỏi áp suất sạc thấp hơn động cơ với vị trí trục cam cứng cho cùng một chỗ (tương ứng với mô men xoắn).
Lý do: Có thể tránh được cả việc thải khí tươi vào ống nạp và dòng khí dư vào xi lanh.
Mômen tăng lên cùng với việc tăng áp
Trên động cơ tăng áp, "quá nhặt" - và do đó có nhiều mô men xoắn hơn - có thể đạt được ở tốc độ động cơ thấp trong phạm vi tính phí với một sự phân chia scavenging bằng cách có một chồng van lớn.
Hiệu quả: Nhiều hơn không khí cần thiết cho sự đốt cháy chảy qua động cơ. Điều này có nghĩa là động cơ turbo tăng áp đôi không có trong phạm vi bơm.
Hiệu ứng thứ hai: Hầu như không có dư lượng khí có trong xilanh.
Tuần hoàn khí thải nội bộ với tải một phần
Ngược lại với vị trí tối ưu và tối ưu hóa công suất của ống xả và ống xả, việc tuần hoàn khí thải cao cũng có thể buộc phải điều chỉnh lượng trục nạp và trục cam thải. Quyết định cho lượng tuần hoàn khí thải nội bộ là: Kích thước của van chồng lên nhau cũng như sự chênh lệch áp suất giữa ống xả và đường ống nạp.
Việc tuần hoàn khí thải trong nước có những đặc điểm sau:
Mục Giải trình Mục Giải trình
1 Nâng van 2 Trượt trục cam thải ra
3 Trục cam lan truyền 4 Góc cua trục khuỷu
Động cơ servo Valvetronic
Động cơ servvet Valvetronic thế hệ thứ ba cũng chứa cảm biến để xác định vị trí của trục lệch tâm. Một tính năng đặc biệt nữa là động cơ servvet Valvetronic được bao quanh bởi dầu động cơ. Một vòi phun dầu đảm bảo rằng ổ trục vít cho trục lệch tâm được bôi trơn.
Mô tơ động cơ dòng trực tiếp không chải có tích hợp cảm biến được sử dụng như động cơ servvet Valvetronic.Động cơ dòng trực tiếp này không cần bảo trì nhờ chuyển đổi điện không tiếp xúc và rất mạnh (nâng cao hiệu quả). Nhờ sử dụng mô-đun điện tử tích hợp, động cơ servvet Valvetronic có thể được điều khiển rất chính xác.
Ví dụ N55
Mục Giải trình Mục Giải trình
1 Ổ cắm 2 Trục Worm
3 Se chỉ luồn kim 4 Nắp đậy
5 Bánh xe cảm biến nam châm 6 Rotor với 4 nam châm
7 cảm biến số 8 Stator
9 Nhà ở 10 Vòng bi
Kích hoạt động cơ servo Valvetronic được giới hạn ở mức tối đa là 40 ampe. Trong khoảng thời gian lớn hơn 200 phần nghìn giây, có thể cung cấp tối đa 20 ampe. Động cơ servvet Valvetronic được kích hoạt thông qua điều chế độ rộng xung. Chu kỳ nhiệm vụ là từ 5 đến 98%.
Hình dưới đây cho thấy các thành phần Valvetronic trong động cơ N55.
Ví dụ N55
Mục Giải trình Mục Giải trình
1 Vòi phun dầu 2 Trục lệch tâm
3 Xoắn xoắn 4 Cánh cổng
5 Trục cam 6 Đòn trung gian
7 Người theo dõi bánh xe lăn số 8 Bồi lấp van thủy lực
9 Van mùa xuân 10 Van hút
11 Động cơ servo Valvetronic 12 Van xả
13 Van mùa xuân 14 Bồi lấp van thủy lực
15 Người theo dõi bánh xe lăn 16 Trục cam thải
17 Nắp kín 18 Kết nối phích cắm 12 chân
Động cơ servvet Valvetronic được cung cấp bởi Digital Engine Electronics (DME) với 5 Volts. 5 Bộ cảm biến Hall hiệu quả cung cấp cho Digital Engine Electronics (DME) với các tín hiệu. Trong số 5 cảm biến hiệu ứng Hall, 3 được sử dụng cho nhận dạng gần đúng và 2 để phân loại chi tiết. Điều này có nghĩa là góc quay của động cơ servvet Valvetronic có thể được xác định ở <7.5 °. Nhờ tỷ lệ trục con sâu, điều này cho phép điều chỉnh đột qu very rất nhanh và chính xác.
Tổng quan về hệ thống
Hình dưới đây cho biết tổng quan về hệ thống van của động cơ N55:
Mục Giải trình Mục Giải trình
1 Hộp phân phối điện, khoang động cơ 2 Relay Valvetronic
3 Điện tử công cụ kỹ thuật số 4 Van solenoid VANOS, đầu vào
5 Van solenoid VANOS, ống xả 6 Cảm biến trục cam, trục cam hút
7 Cảm biến trục cam, trục cam thải số 8 Động cơ servo Valvetronic
Chức năng hệ thống
Các chức năng hệ thống sau đây được mô tả:
Việc điều khiển thời gian trục cam biến đã được tối ưu hóa. Tối ưu hóa bây giờ cho phép tốc độ điều chỉnh nhanh hơn của bộ truyền động Van Van. Tối ưu hóa cũng làm giảm khả năng nhiễm bẩn.
Bánh xe cảm biến trục cam hiện nay là 1 thành phần và không còn được làm bằng 2 phần. Phương pháp này làm tăng tính chính xác của sản xuất và giảm chi phí.
Van van ngược với bộ lọc đã được tích hợp trong van điện từ VANOS. Phương pháp này cũng cho phép giảm số lượng ống dẫn dầu trong đầu xi-lanh. Hơn nữa, các van không quay trở lại đã được tích hợp trong van điện từ VANOS. Bộ lọc trên van điện từ VANOS đảm bảo chức năng không bị lỗi và chắc chắn ngăn không cho van điện từ VANOS bị kẹt bởi các hạt bụi bẩn.
Việc kiểm soát lượng và trục cam thải là biến trong phạm vi điều chỉnh tối đa của họ. Khi đã đạt đến vị trí trục cam chính xác, Van solenoid của VANOS đảm bảo rằng lượng dầu trong bình định vị trong cả hai buồng vẫn không đổi. Điều này giữ trục cam ở vị trí này. Để thực hiện việc điều chỉnh, điều khiển thời gian trục cam thay đổi yêu cầu tín hiệu phản hồi về vị trí hiện tại của trục cam. Cảm biến trục khuỷu về phần hút và xả đã ghi lại vị trí của trục cam. Khi khởi động động cơ, trục cam lấy ở vị trí cuối ("trễ"). Khi động cơ được khởi động, trục cam thải được nạp trước bằng lò xo và giữ ở vị trí "tiên tiến".
Ví dụ N55
Mục Giải trình Mục Giải trình
1 Bộ điều chỉnh VANOS xả 2 Tiêu thụ đơn vị VANOS
3 Ống dẫn dầu chính 4 Van solenoid VANOS, đầu vào
5 Van solenoid VANOS, ống xả 6 Chuỗi căng thẳng
Van điều khiển đột qu,, Valvetronic
Một trục lệch tâm có thể điều chỉnh bằng điện sẽ làm thay đổi hành động của trục cam trên trục cam thông qua một đòn trung gian. Kết quả của việc này là nâng van.
Một tính năng đặc biệt là cảm biến trục lệch trục không còn nằm trên trục lệch tâm; Nó đã được tích hợp trong servomotor.
Valvetronic III được sử dụng. Sự khác biệt giữa Valvetronic III và Valvetronic II nằm trong sự sắp xếp của động cơ servvet Valvetronic và cảm biến. Với Valvetronic III, mức độ hỗn loạn khi kết thúc quá trình nén được tăng lên để tối ưu hóa việc chuẩn bị pha trộn trước và mặt nạ, như đã từng xảy ra với Valvetronic II. Phong trào tính năng cải thiện sự đốt cháy trong phạm vi tải một phần và chế độ làm nóng của chất xúc tác.
Nâng cao
Sự tiến bộ dẫn đến sự khác biệt trong đột qu of của hai van nạp lên đến 1,8 mm trong dải tải phần phụ thấp hơn. Điều này swirls khí tươi được rút ra, làm cho nó xoay.
Mặt nạ
Masking là hình dạng ở chỗ van. Ảnh hưởng của hình dạng này là không khí trong lành đến được sắp thẳng theo cách mà kết quả chuyển động mong muốn. Các biện pháp này là, ví dụ, sự chậm trễ về sự cháy được giảm khoảng Góc quay 10 °. Quá trình đốt cháy được hoàn thành nhanh hơn và có thể sử dụng chồng lên nhau nhiều hơn. Điều này cho phép giảm đáng kể phát thải NO x .
Các đặc tính đáp ứng có thể được cải thiện bằng cách kết hợp Valvetronic III, phun nhiên liệu trực tiếp và tăng áp. Như trong trường hợp động cơ hút tự nhiên với Valvetronic, các đặc tính phản ứng lên đến tải trọng toàn bộ hút tự nhiên được rút ngắn vì không cần phải làm thủ tục đổ đầy của hệ thống hút không khí vào. Việc gia tăng momen xoắn khi khởi động của bộ tăng áp thải ở tốc độ động cơ thấp có thể được đẩy nhanh bằng cách thiết lập một phần đột qu stroke. Điều này thúc đẩy việc tẩy các khí còn sót lại dẫn tới việc gia tăng mô men xoắn nhanh hơn.
Một động cơ dòng trực tiếp không chổi than mới được sử dụng. Động cơ servo Valvetronic có các tính năng đặc biệt sau:
Valvetronic đã được phát triển để giảm tiêu thụ nhiên liệu. Việc kích hoạt của Valvetronic bây giờ đã được tích hợp trong Digital Engine Electronics (DME). Không khí cung cấp cho động cơ khi Valvetronic hoạt động được điều chỉnh bởi van biến đổi trên van nạp chứ không phải thiết bị truyền động van điều khiển điện.
Hình dưới đây cho thấy các thành phần Valvetronic trong động cơ N55
Mục Giải trình Mục Giải trình
1 Tiêu thụ đơn vị VANOS 2 Bộ điều chỉnh VANOS xả
3 Nhà trục cam 4 Động cơ servo Valvetronic
5 Xoắn xoắn 6 Cánh cổng
7 Đòn trung gian số 8 Đầu van
9 Người theo dõi bánh xe lăn 10 Trục cam
11 Trục lệch tâm 12 Vòi phun dầu
13 Dây chuyền thổi khí
Bộ truyền động van điều khiển điện được kích hoạt cho các chức năng sau:
Các vị trí đăng ký được lưu lại sau đó. Những vị trí này được sử dụng làm cơ sở để tính toán sự nâng van thực tế trong mọi tình huống. Quá trình thích ứng là tự động.
Mỗi lần động cơ được khởi động lại, vị trí của trục lệch tâm được so sánh với các giá trị đã đăng ký. Nếu sau khi sửa chữa, ví dụ, một vị trí khác nhau của trục lệch tâm được phát hiện, quá trình thích ứng được thực hiện. Thêm vào đó, sự thích nghi có thể được bắt đầu thông qua hệ thống chẩn đoán.
Hình dưới đây cho biết các thành phần trong động cơ N55
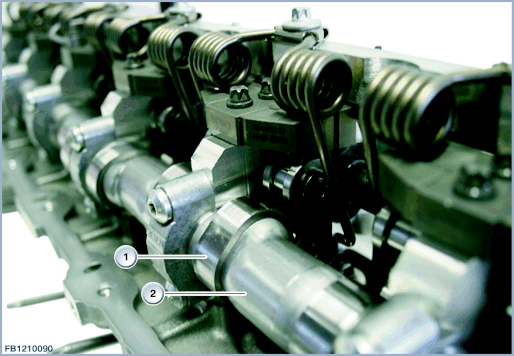
Mục Giải trình Mục Giải trình
1 Cam trong hình dạng vỏ 2 Ống sóng
Bánh răng
Thiết bị van bao gồm toàn bộ van điều khiển van biến áp (Valvetronic) và hệ thống điều khiển thời gian trục cam biến đổi (đôi van), cho phép lựa chọn tự do thời gian đóng của van nạp. Thời gian nâng van chỉ diễn ra ở phía cửa nhận; Kiểm soát trục cam xảy ra trên đường ống nạp và xả.
Kiểm soát tải không có bướm ga chỉ có thể thực hiện được nếu có thể kiểm soát được các biến sau:
- Van nâng của van hút
- Điều chỉnh trục luồng trục nạp và trục cam.
Mô tả thành phần ngắn gọn
Các thành phần sau đây được mô tả cho các van gear:
- Trục cam
- Lượng và van xả
- Cảm biến trục cam vào và cảm biến trục cam thải
- Van van solanoid của VANOS và Van xả VANOS
- Động cơ servo Valvetronic
Chỉ sử dụng trục cam nhẹ. Trục cam thải đã được trang bị với các cuộc đua vòng bi và đóng gói trong một nhà ở trục cam. Vỏ trục cam giảm bọt dầu trong quá trình vận hành.
Lượng và van xả
Thiết bị van được trang bị hệ thống kiểm soát thời gian trục cam thay đổi (VANOS đôi) cho trục nạp và trục cam. VANOS cho phép thay đổi thời gian trong việc mở van nạp và xả.
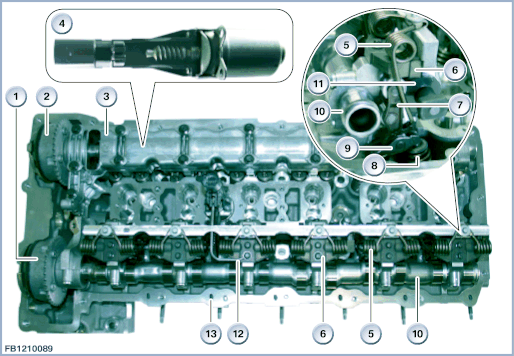
Cảm biến trục cam vào và cảm biến trục cam thải
Hai cảm biến trục cam bắt đầu giai đoạn khoảng cách của trục cam. Để kết thúc này, một bánh xe tăng (bánh xe cảm biến trục cam) được cố định vào trục cam. Cảm biến trục cam hoạt động theo hiệu ứng Hall. Nguồn cung cấp điện áp được điều khiển bởi Thiết bị Điện tử Kỹ thuật số (DME) với đầu cuối 15. Bộ cảm biến này cung cấp tín hiệu số qua đường tín hiệu đến Điện tử Điện tử số (DME).
Cảm biến trục khuỷu nạp được gắn vào vỏ đầu xi-lanh. Trong trường hợp thất bại của cảm biến trục khuỷu, Digital Engine Electronics (DME) sử dụng tín hiệu để tính tốc độ động cơ. Cảm biến trục khuỷu và cảm biến trục cam bắt đầu là cần thiết cho việc phun nhiên liệu tuần hoàn hoàn toàn (tiêm nhiên liệu diễn ra riêng cho mỗi xylanh tại điểm khởi động cụ thể).
Cảm biến trục khuỷu cho phép Bộ Công cụ Kỹ thuật Số điện tử (DME) phát hiện ra động cơ 1 xilanh có bị nén hay xả không. Ngoài ra, cảm biến này cung cấp tín hiệu phản hồi cho vị trí trục cam điều khiển điều khiển thời gian trục cam thay đổi (VANOS).
Cảm biến trục khuỷu nạp được thiết kế như là một bộ cảm biến có cảm quan hội trường quy nạp. Bánh xe cảm biến trục cam có 6 khoảng cách sườn khác nhau. Những khoảng cách cánh này được lấy bởi bộ cảm biến hiệu ứng Hall.
Điện tử Công nghệ Số (DME) sử dụng tính năng này để tính toán:
- Tốc độ của trục cam
- Tốc độ điều chỉnh của trục cam
- Vị trí chính xác của trục cam.
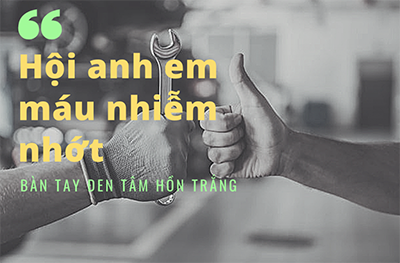
Ví dụ N55
Mục Giải trình Mục Giải trình
1 Cảm biến trục cam vào 2 Kết nối cắm ba chân
Để bắt đầu động cơ, Công cụ Điện tử Kỹ thuật số (DME) kiểm tra các điều kiện sau:
- Tín hiệu không có lỗi từ bộ cảm biến trục khuỷu
- Tín hiệu phải được phát hiện trong một trình tự thời gian cụ thể.
Khi điện áp được áp dụng, nó được phát hiện xem các cảm biến nằm trên răng hoặc trên một khoảng cách.
Điện tử Kỹ thuật số Động cơ (DME) đọc trong tín hiệu cảm biến và sau đó so sánh tín hiệu đó với một mẫu trong đơn vị bộ nhớ của nó. Điều này phát hiện vị trí chính xác của trục cam.
Van van solanoid của VANOS và Van xả VANOS
Hệ thống điều khiển thời gian trục cam biến cải thiện mô-men xoắn trong dải tốc độ động cơ thấp và giữa. Đồng thời, điều chỉnh thời gian hoạt động van tốt nhất cho tốc độ nhàn rỗi và công suất ra tối đa được điều chỉnh. Sự chồng chéo van lớn hơn dẫn đến lượng thấp hơn của khí còn lại ở tốc độ không tải. Việc tuần hoàn khí thải trong phạm vi tải một phần làm giảm thể tích nitrogen oxide.
Những điều sau đây cũng đạt được:
- Làm nóng nhanh hơn của bộ chuyển đổi xúc tác
- Lượng khí thải thấp hơn sau khi bắt đầu lạnh
- Giảm tiêu thụ nhiên liệu.
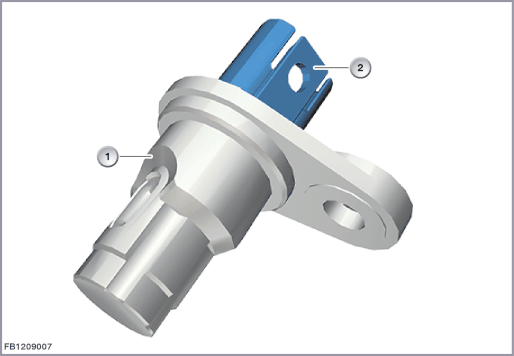
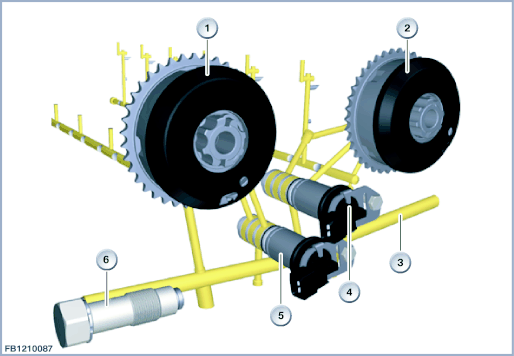
Ví dụ N55
Mục Giải trình Mục Giải trình
A Phía sau của bánh xe gia tăng B Mặt trước của bánh xe gia tăng
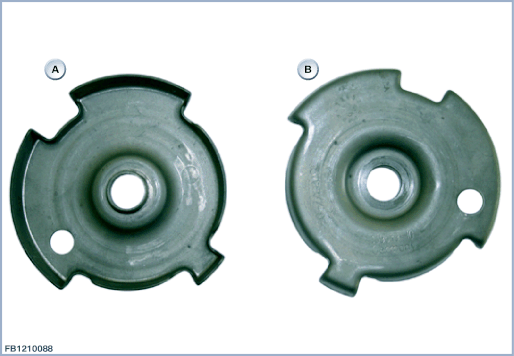
Ví dụ N55
Mục Giải trình Mục Giải trình
1 Van solenoid VANOS, đầu vào 2 Van solenoid VANOS, ống xả
3 Kết nối cắm hai chân 4 Kết nối cắm hai chân
Van solenoid VANOS kích hoạt bộ phận VANOS. Các vị trí yêu cầu của trục nạp và trục cam thải được tính toán từ tốc độ động cơ và tín hiệu tải (phụ thuộc vào nhiệt độ cửa hút và nhiệt độ nước làm mát). Điện tử Công nghệ Số (DME) kích hoạt các đơn vị VANOS thông qua Van solenoid VANOS.
Van đầu vào và van xả của VANOS được định vị trục trên mặt trước của đầu xi-lanh. Van solenoid VANOS (có van không van trở lại) phân phối áp suất dầu cho hai đơn vị VANOS.
Tốc độ không tải:
Ở tốc độ không tải, trục cam được điều chỉnh sao cho có sự chồng chéo nhẹ để tối ưu hóa tiêu thụ và vận hành êm ái. Sự chồng chéo van nhỏ nhất đã đạt được với sự tuyệt vời của sự lan truyền lượng khí thải lớn nhất có thể và sự lan rộng của ống xả có thể xảy ra. Van solenoid của VANOS bị mất điện ở đây. Vị trí trục cam cũng được giả định khi ngừng động cơ. Trong trạng thái này, bộ điều chỉnh trục khuỷu khóa để sau khi khởi động động cơ, có một sự điều chỉnh trục cam ổn định. Điều chỉnh trục cam ổn định này cũng đạt được khi bơm dầu chưa xây dựng được áp suất dầu đủ để điều chỉnh trục cam. Với yêu cầu điều chỉnh đầu tiên, dầu chảy trong mở khóa điều chỉnh trục cam thải.
Công suất ra:
Để đạt được mô men xoắn cao ở tốc độ động cơ thấp, van xả được mở muộn. Điều này cho phép mở rộng quá trình đốt để di chuyển piston lâu hơn. Ở tốc độ động cơ cao, van lớn hơn chồng lên nhau (van xả mở và van xả mở muộn) đạt được công suất đầu ra chiều cao.
Để đạt được mô men cao, phải đạt được hiệu suất cao. Tùy thuộc vào chân không ống nạp (áp suất nạp) và áp suất xả của ống xả, van nạp hoặc xả phải hoặc mở hoặc đóng sớm hay muộn hơn. Một động cơ với VANOS nằm trong một phạm vi rộng tốc độ động cơ với phí xi lanh tối ưu hóa. Một động cơ với VANOS đòi hỏi áp suất sạc thấp hơn động cơ với vị trí trục cam cứng cho cùng một chỗ (tương ứng với mô men xoắn).
Lý do: Có thể tránh được cả việc thải khí tươi vào ống nạp và dòng khí dư vào xi lanh.
Mômen tăng lên cùng với việc tăng áp
Trên động cơ tăng áp, "quá nhặt" - và do đó có nhiều mô men xoắn hơn - có thể đạt được ở tốc độ động cơ thấp trong phạm vi tính phí với một sự phân chia scavenging bằng cách có một chồng van lớn.
Hiệu quả: Nhiều hơn không khí cần thiết cho sự đốt cháy chảy qua động cơ. Điều này có nghĩa là động cơ turbo tăng áp đôi không có trong phạm vi bơm.
Hiệu ứng thứ hai: Hầu như không có dư lượng khí có trong xilanh.
Tuần hoàn khí thải nội bộ với tải một phần
Ngược lại với vị trí tối ưu và tối ưu hóa công suất của ống xả và ống xả, việc tuần hoàn khí thải cao cũng có thể buộc phải điều chỉnh lượng trục nạp và trục cam thải. Quyết định cho lượng tuần hoàn khí thải nội bộ là: Kích thước của van chồng lên nhau cũng như sự chênh lệch áp suất giữa ống xả và đường ống nạp.
Việc tuần hoàn khí thải trong nước có những đặc điểm sau:
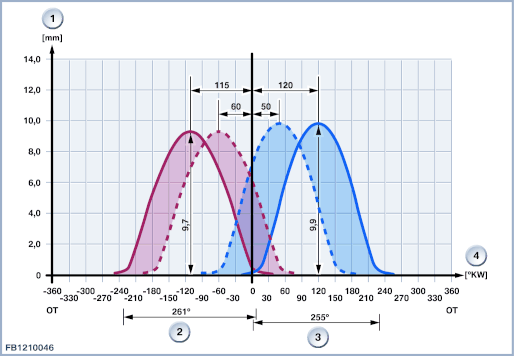
- Thời gian đáp ứng nhanh so với việc tuần hoàn khí thải từ bên ngoài (với lưu thông khí thải nội bộ, không có khí dư trong hệ thống lấy nước)
- Lọc khí xả nhanh vào xi lanh (với động cơ lạnh, nhiệt bổ sung cải thiện việc chuẩn bị hỗn hợp và dẫn đến sự phát thải thấp hơn của hydrocarbon)
- Giảm nhiệt độ của quá trình đốt và do đó làm giảm phát thải nitơ ôxít.
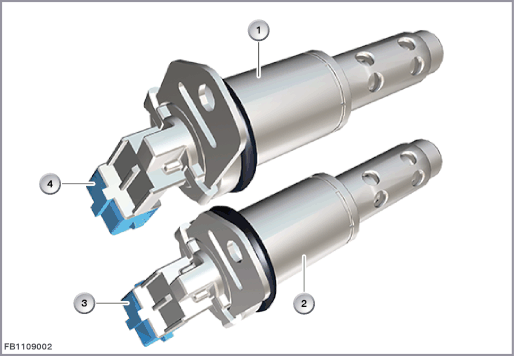
Mục Giải trình Mục Giải trình
1 Nâng van 2 Trượt trục cam thải ra
3 Trục cam lan truyền 4 Góc cua trục khuỷu
Động cơ servo Valvetronic
Động cơ servvet Valvetronic thế hệ thứ ba cũng chứa cảm biến để xác định vị trí của trục lệch tâm. Một tính năng đặc biệt nữa là động cơ servvet Valvetronic được bao quanh bởi dầu động cơ. Một vòi phun dầu đảm bảo rằng ổ trục vít cho trục lệch tâm được bôi trơn.
Mô tơ động cơ dòng trực tiếp không chải có tích hợp cảm biến được sử dụng như động cơ servvet Valvetronic.Động cơ dòng trực tiếp này không cần bảo trì nhờ chuyển đổi điện không tiếp xúc và rất mạnh (nâng cao hiệu quả). Nhờ sử dụng mô-đun điện tử tích hợp, động cơ servvet Valvetronic có thể được điều khiển rất chính xác.
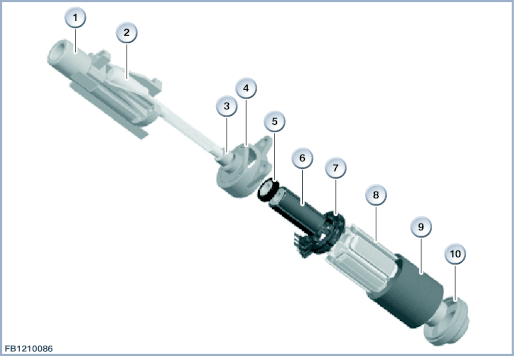
Ví dụ N55
Mục Giải trình Mục Giải trình
1 Ổ cắm 2 Trục Worm
3 Se chỉ luồn kim 4 Nắp đậy
5 Bánh xe cảm biến nam châm 6 Rotor với 4 nam châm
7 cảm biến số 8 Stator
9 Nhà ở 10 Vòng bi
Kích hoạt động cơ servo Valvetronic được giới hạn ở mức tối đa là 40 ampe. Trong khoảng thời gian lớn hơn 200 phần nghìn giây, có thể cung cấp tối đa 20 ampe. Động cơ servvet Valvetronic được kích hoạt thông qua điều chế độ rộng xung. Chu kỳ nhiệm vụ là từ 5 đến 98%.
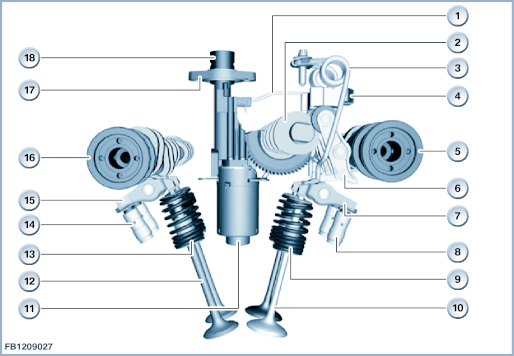
Hình dưới đây cho thấy các thành phần Valvetronic trong động cơ N55.
Ví dụ N55
Mục Giải trình Mục Giải trình
1 Vòi phun dầu 2 Trục lệch tâm
3 Xoắn xoắn 4 Cánh cổng
5 Trục cam 6 Đòn trung gian
7 Người theo dõi bánh xe lăn số 8 Bồi lấp van thủy lực
9 Van mùa xuân 10 Van hút
11 Động cơ servo Valvetronic 12 Van xả
13 Van mùa xuân 14 Bồi lấp van thủy lực
15 Người theo dõi bánh xe lăn 16 Trục cam thải
17 Nắp kín 18 Kết nối phích cắm 12 chân
Động cơ servvet Valvetronic được cung cấp bởi Digital Engine Electronics (DME) với 5 Volts. 5 Bộ cảm biến Hall hiệu quả cung cấp cho Digital Engine Electronics (DME) với các tín hiệu. Trong số 5 cảm biến hiệu ứng Hall, 3 được sử dụng cho nhận dạng gần đúng và 2 để phân loại chi tiết. Điều này có nghĩa là góc quay của động cơ servvet Valvetronic có thể được xác định ở <7.5 °. Nhờ tỷ lệ trục con sâu, điều này cho phép điều chỉnh đột qu very rất nhanh và chính xác.
Tổng quan về hệ thống
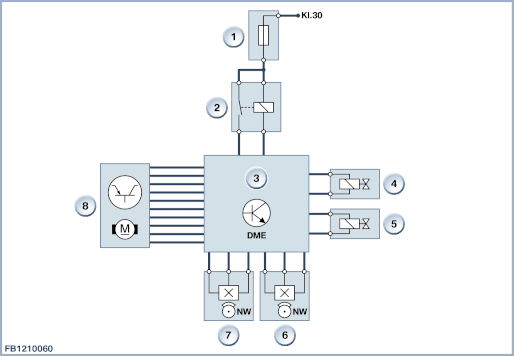
Hình dưới đây cho biết tổng quan về hệ thống van của động cơ N55:
Mục Giải trình Mục Giải trình
1 Hộp phân phối điện, khoang động cơ 2 Relay Valvetronic
3 Điện tử công cụ kỹ thuật số 4 Van solenoid VANOS, đầu vào
5 Van solenoid VANOS, ống xả 6 Cảm biến trục cam, trục cam hút
7 Cảm biến trục cam, trục cam thải số 8 Động cơ servo Valvetronic
Chức năng hệ thống
Các chức năng hệ thống sau đây được mô tả:
- Điều khiển thời gian trục cam thay đổi, VANOS
- Van điều khiển đột qu,, Valvetronic.
Việc điều khiển thời gian trục cam biến đã được tối ưu hóa. Tối ưu hóa bây giờ cho phép tốc độ điều chỉnh nhanh hơn của bộ truyền động Van Van. Tối ưu hóa cũng làm giảm khả năng nhiễm bẩn.
Bánh xe cảm biến trục cam hiện nay là 1 thành phần và không còn được làm bằng 2 phần. Phương pháp này làm tăng tính chính xác của sản xuất và giảm chi phí.
Van van ngược với bộ lọc đã được tích hợp trong van điện từ VANOS. Phương pháp này cũng cho phép giảm số lượng ống dẫn dầu trong đầu xi-lanh. Hơn nữa, các van không quay trở lại đã được tích hợp trong van điện từ VANOS. Bộ lọc trên van điện từ VANOS đảm bảo chức năng không bị lỗi và chắc chắn ngăn không cho van điện từ VANOS bị kẹt bởi các hạt bụi bẩn.
Việc kiểm soát lượng và trục cam thải là biến trong phạm vi điều chỉnh tối đa của họ. Khi đã đạt đến vị trí trục cam chính xác, Van solenoid của VANOS đảm bảo rằng lượng dầu trong bình định vị trong cả hai buồng vẫn không đổi. Điều này giữ trục cam ở vị trí này. Để thực hiện việc điều chỉnh, điều khiển thời gian trục cam thay đổi yêu cầu tín hiệu phản hồi về vị trí hiện tại của trục cam. Cảm biến trục khuỷu về phần hút và xả đã ghi lại vị trí của trục cam. Khi khởi động động cơ, trục cam lấy ở vị trí cuối ("trễ"). Khi động cơ được khởi động, trục cam thải được nạp trước bằng lò xo và giữ ở vị trí "tiên tiến".
Ví dụ N55
Mục Giải trình Mục Giải trình
1 Bộ điều chỉnh VANOS xả 2 Tiêu thụ đơn vị VANOS
3 Ống dẫn dầu chính 4 Van solenoid VANOS, đầu vào
5 Van solenoid VANOS, ống xả 6 Chuỗi căng thẳng
Van điều khiển đột qu,, Valvetronic
Một trục lệch tâm có thể điều chỉnh bằng điện sẽ làm thay đổi hành động của trục cam trên trục cam thông qua một đòn trung gian. Kết quả của việc này là nâng van.
Một tính năng đặc biệt là cảm biến trục lệch trục không còn nằm trên trục lệch tâm; Nó đã được tích hợp trong servomotor.
Valvetronic III được sử dụng. Sự khác biệt giữa Valvetronic III và Valvetronic II nằm trong sự sắp xếp của động cơ servvet Valvetronic và cảm biến. Với Valvetronic III, mức độ hỗn loạn khi kết thúc quá trình nén được tăng lên để tối ưu hóa việc chuẩn bị pha trộn trước và mặt nạ, như đã từng xảy ra với Valvetronic II. Phong trào tính năng cải thiện sự đốt cháy trong phạm vi tải một phần và chế độ làm nóng của chất xúc tác.
Nâng cao
Sự tiến bộ dẫn đến sự khác biệt trong đột qu of của hai van nạp lên đến 1,8 mm trong dải tải phần phụ thấp hơn. Điều này swirls khí tươi được rút ra, làm cho nó xoay.
Mặt nạ
Masking là hình dạng ở chỗ van. Ảnh hưởng của hình dạng này là không khí trong lành đến được sắp thẳng theo cách mà kết quả chuyển động mong muốn. Các biện pháp này là, ví dụ, sự chậm trễ về sự cháy được giảm khoảng Góc quay 10 °. Quá trình đốt cháy được hoàn thành nhanh hơn và có thể sử dụng chồng lên nhau nhiều hơn. Điều này cho phép giảm đáng kể phát thải NO x .
Các đặc tính đáp ứng có thể được cải thiện bằng cách kết hợp Valvetronic III, phun nhiên liệu trực tiếp và tăng áp. Như trong trường hợp động cơ hút tự nhiên với Valvetronic, các đặc tính phản ứng lên đến tải trọng toàn bộ hút tự nhiên được rút ngắn vì không cần phải làm thủ tục đổ đầy của hệ thống hút không khí vào. Việc gia tăng momen xoắn khi khởi động của bộ tăng áp thải ở tốc độ động cơ thấp có thể được đẩy nhanh bằng cách thiết lập một phần đột qu stroke. Điều này thúc đẩy việc tẩy các khí còn sót lại dẫn tới việc gia tăng mô men xoắn nhanh hơn.
Một động cơ dòng trực tiếp không chổi than mới được sử dụng. Động cơ servo Valvetronic có các tính năng đặc biệt sau:
- Khái niệm mở (cung cấp với dầu)
- Góc của trục lệch tâm được tính từ vòng quay của động cơ
- Điện năng tiêu thụ giảm khoảng xấp xỉ 50%
- Động thái lớn hơn của bộ điều chỉnh (ví dụ, điều chỉnh cụ thể-cylinder hoặc điều khiển tốc độ không tải)
- Giảm trọng lượng (khoảng 600 gram).
Valvetronic đã được phát triển để giảm tiêu thụ nhiên liệu. Việc kích hoạt của Valvetronic bây giờ đã được tích hợp trong Digital Engine Electronics (DME). Không khí cung cấp cho động cơ khi Valvetronic hoạt động được điều chỉnh bởi van biến đổi trên van nạp chứ không phải thiết bị truyền động van điều khiển điện.
Hình dưới đây cho thấy các thành phần Valvetronic trong động cơ N55
Mục Giải trình Mục Giải trình
1 Tiêu thụ đơn vị VANOS 2 Bộ điều chỉnh VANOS xả
3 Nhà trục cam 4 Động cơ servo Valvetronic
5 Xoắn xoắn 6 Cánh cổng
7 Đòn trung gian số 8 Đầu van
9 Người theo dõi bánh xe lăn 10 Trục cam
11 Trục lệch tâm 12 Vòi phun dầu
13 Dây chuyền thổi khí
Bộ truyền động van điều khiển điện được kích hoạt cho các chức năng sau:
- Khởi động máy (khởi động)
- Kiểm soát tốc độ không hoạt động
- Vận hành toàn tải
- Hoạt động khẩn cấp.
Các vị trí đăng ký được lưu lại sau đó. Những vị trí này được sử dụng làm cơ sở để tính toán sự nâng van thực tế trong mọi tình huống. Quá trình thích ứng là tự động.
Mỗi lần động cơ được khởi động lại, vị trí của trục lệch tâm được so sánh với các giá trị đã đăng ký. Nếu sau khi sửa chữa, ví dụ, một vị trí khác nhau của trục lệch tâm được phát hiện, quá trình thích ứng được thực hiện. Thêm vào đó, sự thích nghi có thể được bắt đầu thông qua hệ thống chẩn đoán.
Hình dưới đây cho biết các thành phần trong động cơ N55
Mục Giải trình Mục Giải trình
1 Cam trong hình dạng vỏ 2 Ống sóng